Arduino ESP32 Coding and Application
ดูตัวอย่างและโหลดโค้ดได้ตามลิงค์ในช่อง YouTube
YouTube: https://www.youtube.com/@traningteam2022
เนื้อหา
- Arduino, ESP32, Coding, Programming
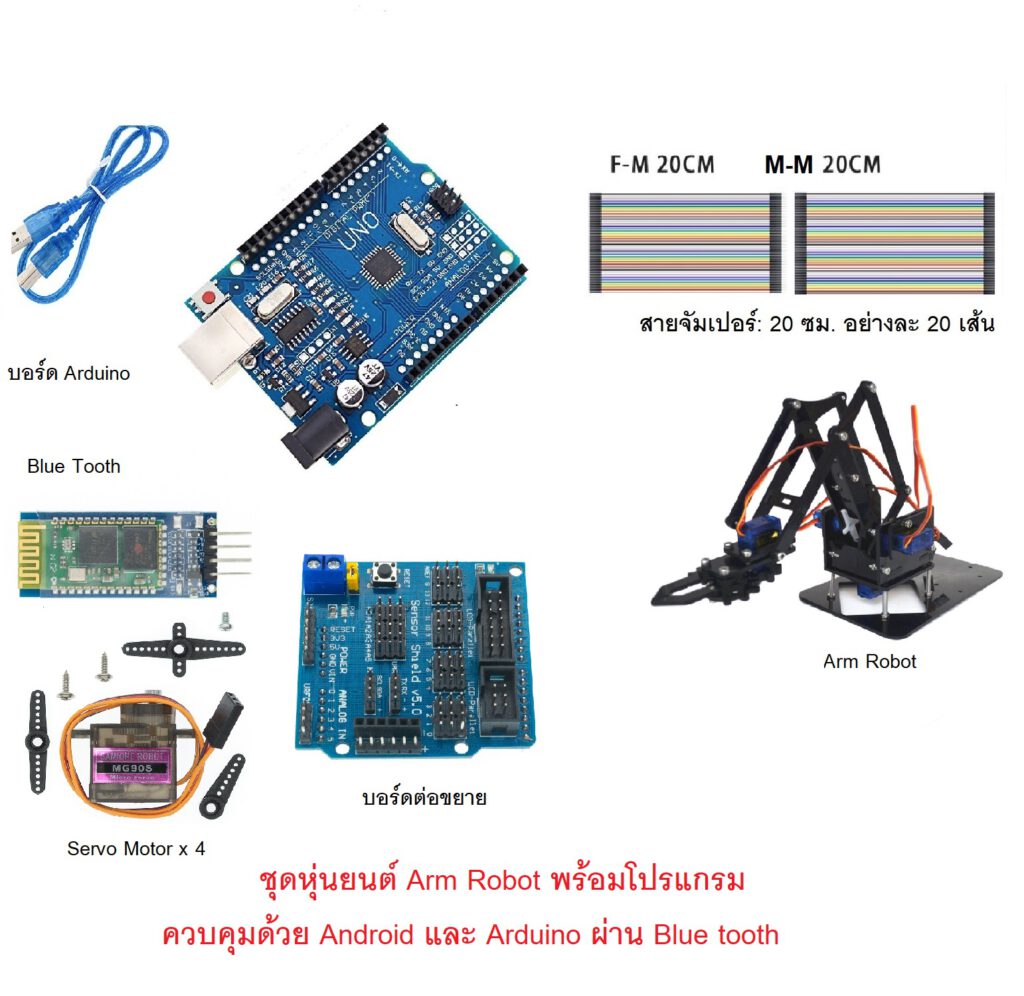
- Robot, Arm Robot
- IoT, Google Sheets, WiFi, Bluetooth
หากต้องการให้ฝึกอบรม แจ้งได้ตามช่องทางในเว็บไซต์
วิดีโอ Arduino ESP32
EP#15 Arm Robot ควบคุมผ่าน Bluetooth
EP#17 หุ่นยนต์แขนกล 6 แกน
Arduino Coding และ IoT
EP#09 ESP32 ส่งข้อมูลไป Google Sheets
EP#10 ESP32 กับ OPC Server / SCADA
EP#07 Bluetooth Arduino
EP#16 Happy New Year Arduino
